

Les robots évolués de Boston Dynamics ; Mystérieux cercles sous-marins ; Timelapse fascinant à partir de milliers d’images
Les robots évolués de Boston Dynamics.
Boston Dynamics est une société de conception et d’ingénierie robotique américaine crée en 1992 par le Pr Marc Raibert en marge du prestigieux Massachusetts Institute of Technology et propriété de Google aujourd’hui, qui élabore des robots à la pointe de la technologie particulièrement axés autour d’humanoïdes ou des robots « animaux » avec capacité d’auto-équilibrage leur permettant d’évoluer sur des terrains accidentés, ces robots anthropomorphiques, fruit de recherches en intelligence informatique et dans les systèmes de simulation, peuvent marcher et s’adapter à des environnements très variés de manière autonome. Le financement de la majorité des projets les plus avancés de Boston Dynamics provient de sources militaires, notamment de l’Agence américaine de la Défense.
Cette société est aussi à l’origine du robot le plus rapide du monde, Sheetah (Guépard), dont il est question en bas de cette page.
– Handle est un robot de 2 mètres de haut doté de bras articulés et de roues à l’extrémité de simili jambes pouvant effectuer des sauts de 1,2 mètre et circuler à la vitesse de 15 km/h, il fonctionne à l’énergie électrique pour actionner les systèmes hydrauliques de 10 articulations.
– Wildcat : robot à quatre pattes en cours d’élaboration qui peut courir sur tous types de terrains, avec une pointe de 25.6 km/h sur terrain plat.
– Legged Squad Support System (LS3) : robot tout-terrain est conçu pour transporter 400 kg de charge utile et parcourir 32 Km sans ravitaillement. LS3 est équipé de capteurs qui lui permettent de suivre un humain tout en évitant les obstacles sur le terrain.
– Ce robot manipule les objets lourds, avec pour objectif d’utiliser la force des jambes et du torse pour aider et favoriser les mouvements et la puissance du bras, dynamique corporelle qui met en jeu l’ensemble du corps, approche couramment utilisée par les athlètes humains et qui permettra d’améliorer les performances de robots plus évolués. Le parpaing pèse environ 16kg et le meilleur lancer s’établit à un peu plus de 5 mètres.
– LegLab : par le passé, les fondateurs de Boston Dynamics ont développé une nouvelle génération de robots dynamiques, voici quelques exemples de ces robots unijambistes, bipèdes et quadrupèdes des débuts développés à Carnegie Mellon (1980-1986) et au MIT (1987-1995).
– Rise : un robot escaladeur qui saisit la micro-texture de la surface à l’aide de pieds et de mouvements spéciaux.
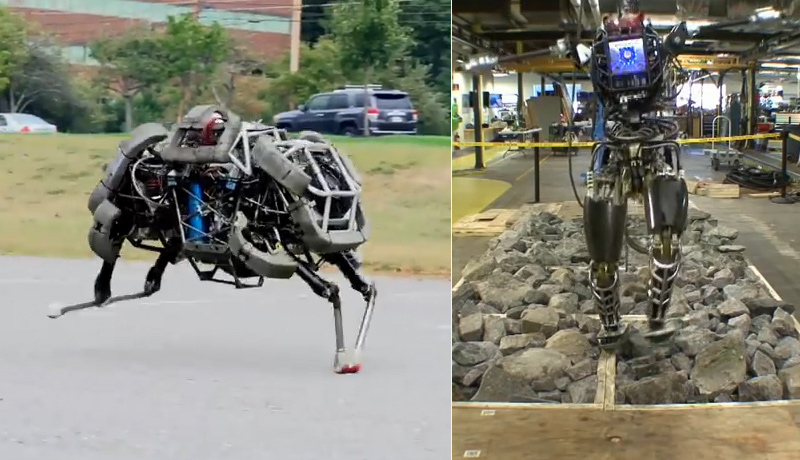
– Atlas est un robot anthropomorphe conçu pour fonctionner sur terrain accidenté, la vidéo le montre en marche tout en conservant son équilibre sur un terrain rocailleux et lorsqu’il est poussé latéralement, le système d’équilibrage et de contrôle qui se base sur des données inertielles, cinématiques et de charge à partir des capteurs disposés sur Atlas, positionne les pieds et balance les bras et le haut du corps afin de lui permettre de rester debout.
– Nouvelle version d’Atlas (cf. ci-dessus). Encore plus anthropomorphe, il est aussi capable de se relever tout seul après une chute, manipule des objets en s’adaptant aux aléas de leur disposition et sait ouvrir des portes.
– BigDog galope dans les bois, à travers la neige et la boue, escalade des pentes de 35 degrés, porte des charges de 155 kg et garde son équilibre même lorsqu’il déstabilisé ou en glissant sur la glace, il peut faire un jogging de 8 km et grimper sur certaines décombres. Avec ses 76cm de haut, 91cm de long et un poids de 109 kg, BigDog est un système autonome alimenté par un moteur et commandé par un système d’ordinateur de bord qui traite des données issues d’une série de capteurs qui surveillent entre autre la position, la charge et le contact avec le sol, un gyroscope, un système de vision, etc.
– Spot est un robot à quatre pattes conçu pour un fonctionnement en intérieur et en extérieur, il est alimenté en électricité et fonctionne par hydraulique, des capteurs lui permettent d’évoluer sur un terrain accidenté.
– SpotMini est une nouvelle version plus petite du robot Spot (cf. ci-dessus), il est entièrement électrique avec une autonomie moyenne d’environ 90 minutes. Très silencieux, il possède une variété de capteurs de proprioception dans les membres, des caméras qui l’aident pour son orientation.
– Cheetah est un robot quadrupède qui a battu son record de vitesse en courant sur un tapis roulant à plus de 45 km/h, plus rapide que le sprinter champion du monde du 100 mètres Usain Bolt. Ce robot qui fonctionne comme un vrai guépard, dispose d’articulations qui fléchissent en arrière à chaque étape, augmentant ainsi la longueur de foulée et la vitesse de course.
 bostondynamics.com | plus de vidéos sur la chaîne Youtube de Boston Dynamics
bostondynamics.com | plus de vidéos sur la chaîne Youtube de Boston Dynamics

Mystérieux cercles sous-marins.

Le photographe japonais Yoji Ookata a découvert que ces cercles étranges situés à 25 mètres de profondeur et d’un diamètre de 2 mètres sont l’oeuvre de petits poissons-globes (cf. notice wikipédia) : ils les créent en remuant le sable avec leur nageoire dans le but d’attirer les femelles vers le centre de cet ensemble de crêtes, de rainures et de formes circulaires où ils pondent leurs oeufs.
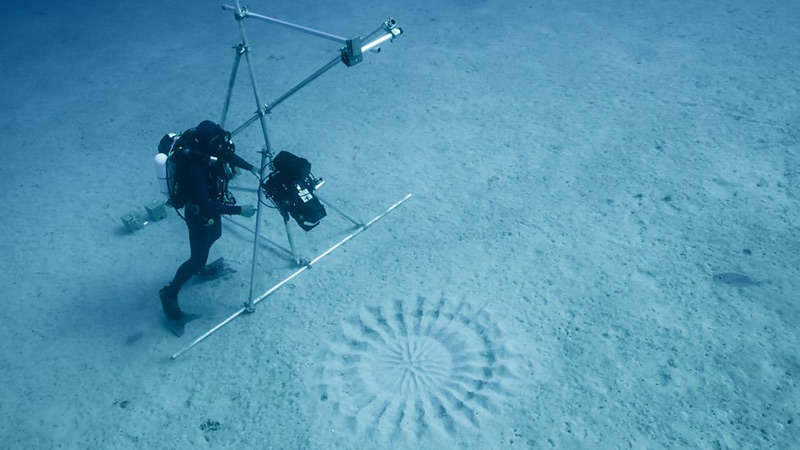
source image BBC.co.uk
Poisson-globe
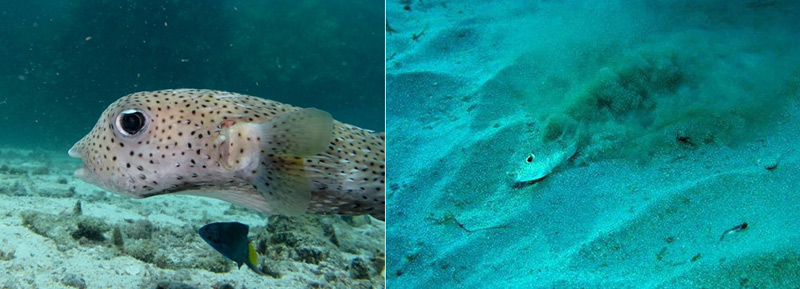
crédit image gauche Yoji Ookata
Timelapse fascinant et abstrait à partir de centaines de milliers d’images.

« Circle of Abstract Ritual » est le titre de ce court métrage fascinant en timelapse et stop motion créé sans effets spéciaux à partir de 300 000 photos qui relèvent aussi bien des affaires terrestres et humaines : feux de forêt, maisons, émeutes, éclairages urbains, etc., que des mouvement cosmiques du ciel étoilés et de la voie lactée, vidéo qui exprime, en empruntant les chemins de l’abstraction confinant à une forme de mysticisme auscultant l’insondable, les cycles de création et de destruction qui ne sont que les pas d’une même danse où terre et ciel, activités humaines et luminosité des étoiles, ombre et lumière, connaissances familières et abstraction, art et astronomie ne font plus qu’un dans une grande collusion circulaire.
